A new study may improve the sense of embodiment when using autonomous prosthetic limbs. The work had left and right limbs are controlled by two people simultaneously and revealed that the visual information necessary to predict the partner’s intentions behind limb movements can significantly enhance the sense of embodiment towards partner-controlled limbs during virtual co-embodiment.
This "joint avatar" project builds on previous work (Hagiwara et al., iScience 2020) which found that the average movements of two individuals using a shared avatar were smoother and straighter than the movements of the individuals. So for users with disabilities in certain limbs, getting them partners to fully control the corresponding limbs of their virtual avatars may be an option.
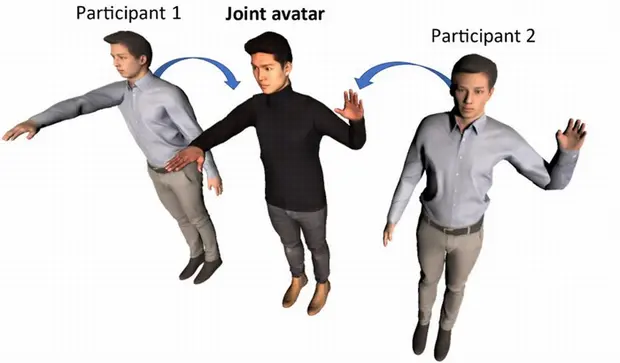
Credit: TOYOHASHI UNIVERSITY OF TECHNOLOGY. ALL RIGHTS RESERVED.
Researchers measured the senses of agency and ownership towards the two arms of the joint avatar and changes in skin conductance levels in response to visual stimuli threatening the two virtual arms. Dyad participants were asked to collaboratively reach one or two target objects appearing at random positions with the two arms of the joint avatar.
The sense of agency, ownership, and skin conductance of participants were significantly higher towards the virtual arm under their control compared to the virtual arm controlled by their partner. Furthermore, the senses of agency and ownership towards the arm controlled by the partner were significantly higher when the participant dyads shared a common intention to reach a single target with both hands or when they were allowed to see their partner’s target while reaching different targets with the two virtual hands, compared to when the partner’s target was invisible (while having two different targets).
These results show that while embodiment towards partner-controlled limbs is lower compared to limbs under one’s own control, visual information necessary to predict the partner’s intentions can positively affect embodiment towards partner-controlled limbs during virtual co-embodiment.




